
Stort sett tar vi det for gitt at den posisjonen GPS-en vår viser, er korrekt.
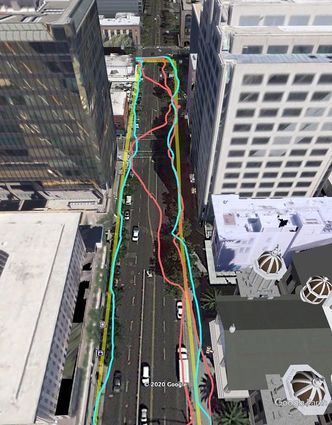
Men er vi i en fremmed by og bruker kart-appen på mobilen for å finne veien tilbake til hotellet, vil det fort kunne se ut som om vi hopper litt rundt fra det ene punktet til det andre mens vi går. Selv om vi faktisk spaserer helt normalt på det samme fortauet hele tiden.
– Byer er brutale for satellittnavigasjon, sier Ardeshir Mohamadi.
Han er doktorgradsstudent ved NTNU og forsker på hvordan man kan gjøre de rimelige GPS-mottagerne, som den du har i mobiltelefonen eller i treningsklokka di, mye mer nøyaktige uten å måtte benytte kostbare ekstra-tjenester.
Å ha nøyaktig GPS-posisjon er ekstra viktig for biler som skal kjøre rundt uten sjåfør – såkalte autonome eller førerløse kjøretøy.
GPS og GNSS
Global Navigation Satellite Systems (GNSS) er en samlebetegnelse for satellittsystemer som brukes til posisjonering, navigasjon og tidssynkronisering (PNT).
I dag finnes det en håndfull slike systemer, hvor det amerikanske GPS er ett av dem. I tillegg har vi det europeiske Galileo-systemet, det russiske GLONASS, det kinesiske BeiDou, samt noen mindre, regionale systemer.
Moderne mottakere bruker i dag alle de fire store GNSS-systemene når en posisjon skal beregnes. Har du for eksempel en mobiltelefon fra 2020 eller nyere, benytter den sannsynligvis alle fire.
Urban canyons

Nå har Mohamadi og kollegaene på NTNU utviklet et nytt system som skal hjelpe førerløse biler med å navigere trygt inne i byen.
– I byer vil glass og betong gjøre at signalene fra satellittene spretter frem og tilbake. Høye bygninger blokkerer sikten, og det som fungerer perfekt ute på en åpen motorvei, bryter sammen når man kommer inn i sentrum, sier Mohamadi.
Problemet er at signalet reflekteres mellom bygninger. Da bruker det lengre tid på å rekke fram til mottakeren. Dermed blir ikke beregningen av avstanden til satellittene riktig, og posisjonen blir unøyaktig.
Slike vanskelige bymiljøer kalles gjerne «urban canyons». Det er som om man befinner seg nede i en dyp kløft. De GPS-signalene som når ned til deg, eller til den førerløse bilen, kan ha blitt reflektert mange ganger på vei ned i kløften.
– For førerløse biler utgjør dette forskjellen mellom selvsikker, trygg atferd og nølende, upålitelig kjøring. Derfor har vi utviklet Smartnav, en posisjoneringsmaskin designet for «urban canyons», forteller Mohamadi.
Nesten på centimeteren
Ikke nok med at satellittsignalene blir forstyrret der nede mellom høyhusene. De signalene som er korrekte, har likevel ikke god nok presisjon.
For å løse dette problemet har forskerne kombinert flere ulike teknologier for å korrigere signalet. Slik har de laget et dataprogram som kan legges inn i navigasjonssystemet til for eksempel førerløse biler.
Til dette fikk de blant annet hjelp av en ny Google-tjeneste. Men før vi går videre kan det være greit å vite hvordan en GPS virker:
GPS er et system av mange små satellitter som går i bane rundt jorden. Satellittene sender ut signaler ved hjelp av radiobølger, som fanges opp av GPS-mottageren. Når mottageren får slike signaler fra minst fire satellitter, kan den regne ut posisjonen sin.


Signalet består av en melding med en kode som forteller om satellittens posisjon og dessuten nøyaktig klokkeslett for når signalet blir sendt ut. Som en slags tekstmelding fra satellitten.
Kaster koden – bruker bølgen
Det er denne koden som ofte blir feil når signalet reflekteres mellom bygninger inne i byen. Den første løsningen NTNU-forskerne studerte, var derfor å se bort fra hele koden. I stedet kan man bruke informasjon om selve radiobølgen.
Er bølgen på vei opp eller ned når den treffer mottakeren? Dette kalles bølgens bærefase.
– Å bruke kun bærefasen kan gi veldig høy nøyaktighet, men det krever tid. Det er ikke særlig praktisk når mottakeren skal bevege seg, sier Mohamadi.
Problemet er at man må holde seg i ro inntil beregningen blir god nok. Ikke bare i et mikrosekund, men i flere minutter.
Men det finnes andre måter å forbedre GPS-signalet. Brukeren kan benytte en tjeneste som korrigerer signalet ved hjelp av basestasjoner, kalt .
RTK fungerer fint så lenge brukeren befinner seg i nærheten av slike stasjoner. Men det er en kostbar løsning, ment for profesjonelle brukere.
En alternativ tilnærming er , som kombinerer presise korreksjoner med satellitt-signaler. Det europeiske Galileo-systemet støtter nå dette ved å kringkaste sine korreksjoner gratis.
Men det er enda mer hjelp å få.
Bærefase-posisjonering
Satellitter sender ut signaler som består av både en kode og en bærebølge (carrier wave).
Kodesignalet brukes normalt for å beregne avstanden til satellitten. I byer blir koden ofte forstyrret av refleksjoner fra bygninger (multipath), og dette gir store feil.
Bærebølgen er en mye mer stabil og presis del av signalet. Den svinger i et jevnt mønster (0–360°).
Bærefase-posisjonering (Phase-Only Positioning) går ut på å se bort fra koden og bruke bare bærebølgen til å beregne posisjon.
Når mottakeren vet hvilken fase av bølgen den mottar, kan den bestemme avstanden til satellitten svært nøyaktig.
Men: Man må finne ut hvor mange hele bølgelengder som har passert. Det kan løses ved hjelp av avansert signalbehandling og bruk av statistiske metoder.
Feil-side-av-gata-problemet
Samtidig som forskerne i Trondheim jobbet med å finne bedre løsninger, lanserte Google en ny tjeneste for sine Android-kunder.
Tenk deg at du planlegger en ferietur til for eksempel London. På nettbrettet ditt åpner du Google Maps. Du taster inn adressen til hotellet, og straks kan du zoome inn på gatemiljøet, studere fasaden på hotellet og høyden på bygningene rundt.
Google har nå slike 3D-modeller av bygninger i nær 4000 byer verden rundt. Nå bruker selskapet disse modellene til å forutse hvordan satellittsignalene vil bli reflektert mellom byggene. Slik vil de løse problemet med at det ser ut som om du går på feil side av gata når du bruker kart-appen.
– De kombinerer data fra sensorer, Wi-Fi, mobilnett og 3D-bygningsmodeller for å produsere jevne posisjonsestimater, som tåler feil på grunn av refleksjoner, sier Mohamadi.
Presisjon man kan stole på
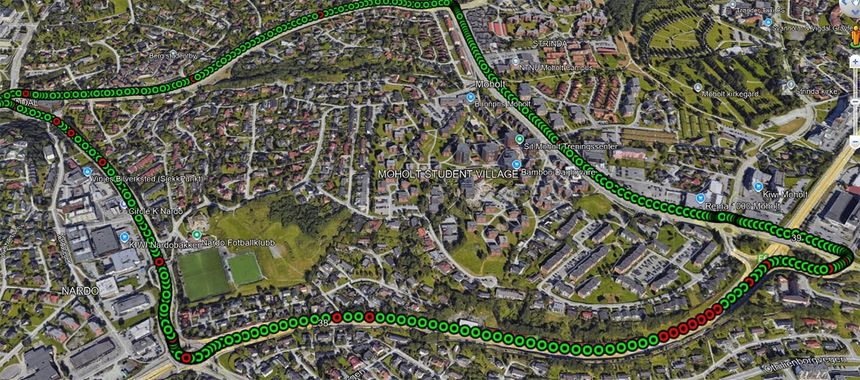
Nå kunne forskerne kombinere alle disse ulike korreksjonssystemene med egenutviklede algoritmer. Da de testet det i Trondheims gater, oppnådde de nøyaktighet bedre enn ti centimeter 90 prosent av tiden.
Dette gir presisjon man kan stole på i byer, mener forskerne.
Bruk av PPP-RTK vil dessuten gjøre teknologien tilgjengelig for folk flest, siden det er en rimelig tjeneste.
– PPP-RTK reduserer behovet for tette nettverk av lokale basestasjoner og dyre abonnementer, og muliggjør billig, stor-skala utrulling på massemarkeds-mottakere, sier Mohamadi.
Hvordan korrigeres GPS-signaler?
Det er ikke bare refleksjoner mellom bygninger som kan gi feil i GPS-posisjoner. Feil i signalet kan oppstå både hos satellittene, i atmosfæren på vei ned og hos mottakeren. Det er flere måter å rette slike feil på.
RTK (Real Time Kinetic):
RTK-posisjonering er en metode som bruker GPS eller andre satellittbaserte navigasjonssystemer til å bestemme presise posisjoner i sanntid.
RTK-posisjonering er en svært nøyaktig posisjoneringsmetode som brukes i et bredt spekter av anvendelser, inkludert oppmåling, bygg- og anleggsarbeid, landbruk og arealforvaltning.
RTK krever to enheter: en basestasjon og en mobil enhet. Basestasjonen står på et fast sted og samler inn satellittdata. Den sender deretter disse dataene til den mobile enheten. Denne bruker, sammen med sin GPS-mottaker, disse dataene til å finne sin nøyaktige posisjon i sanntid.
PPP (Precise point positioning):
En metode som gjør det mulig for én enkelt mottaker å oppnå svært høy nøyaktighet – ned til desimeter- eller centimeternivå.
I motsetning til RTK trenger ikke PPP en nærliggende basestasjon. PPP bruker globale korreksjonsdata for satellittene. Disse dataene beregnes fra et nettverk av globale referansestasjoner. Med disse korreksjonene kan mottakeren regne seg fram til en svært nøyaktig posisjon – uavhengig av hvor i verden den er. Men PPP krever ofte lang oppstartstid (konvergens) – opptil 20–30 minutter før centimeternøyaktighet oppnås.
PPP-RTK:
Kombinerer PPPs globale dekning med RTKs raske konvergens og høye nøyaktighet.
PPP-RTK bruker både globale korreksjoner (PPP) og regionale sanntidsdata fra referansestasjoner.
Artikkelen ble først publisert på Gemini.no
Nye skip styres av Windows XP: Fant admin-passord i åpen tekstfil


