I Star Wars-universet finnes kraften The Force. Kraften kan blant annet brukes til å løfte gjenstander eller levitere. Levitering er en teknologi som ofte dukker opp i science fiction. Kanskje fordi slik teknologi er fjern fra hva vi tenker er mulig?
Professor Andreas Carlson ved Universitetet i Oslo forteller at han fikk øynene opp for denne teknologien for noen år siden, blant annet via en Youtube-video.
– Omtrent for ti år siden var det noen som fant ut at hvis du fester en vibrerende motor til et materiale, som et ark, og holder det mot veggen eller taket, så vil det feste seg der. Det er ikke intuitivt i det hele tatt, sier matematikeren.


Vi møter Carlson i et laboratorium på Matematisk institutt på Blindern fylt av roboter. Ved siden av Carlson sitter Stephane Poulain, som jobber som postdoktor ved samme institutt. Han forteller at flere har forsøkt å lage slike roboter. Det tok ikke lang tid før de kunne brukes til flere ting:
– For fem år siden kom det en artikkel om en liten robot som kan bevege seg i alle retninger, for eksempel opp langs veggen, på taket, langs gulvet, legger Poulain til.
Oppfinnerne bak sveverobotene mente at de fungerer på grunn av komprimering av luften. Da rykket det til i Carlsons fysikkinstinkter. Dette hørtes ikke ut som en troverdig forklaring. Han ville til bunns i hva som egentlig var årsaken til at robotene kunne sveve.
Kraften er ekte
Nå står han i de nyinnvidde kjellerlokalene med sin egen sverm av sveveteknologi.
– Kraften er ekte, slår han fast.
Før han demonstrerer at det virker, forklarer han at dette er noe annet enn andre fjernkrefter. Når fly flyr, fungerer det på en helt annen måte. Teknologien han nå skal vise, er overraskende ukjent for andre enn Youtubes robotentusiaster.

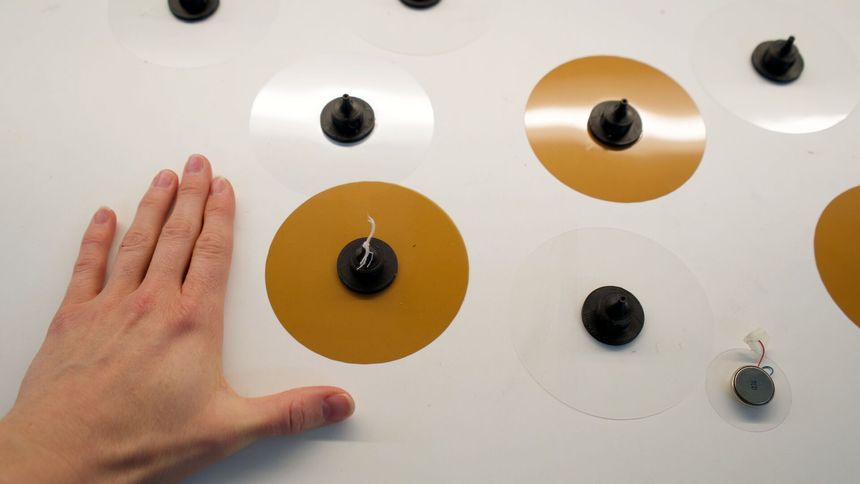
I hånden har han en liten plastplate, om lag tre centimenter i diameter. Midt på platen er det festet en liten motor og et batteri. Når motoren slås på, begynner platen å vibrere. Bevegelsene er knapt synlige, selv om duren fra motoren høres godt.
Deretter holder han den opp mot en metallplate. Den lille dingsen begynner straks å surre rundt over platen. Det ser ut som den sitter fast, for avstanden til platen er svært liten. I realiteten svever den. Den er nemlig ikke i fysisk kontakt med verken taket over den eller gulvet under. Idet motoren skrus av, deiser den ned.
Hvordan kan noe sveve?
Det minner om det som skjer når du setter fra deg noe på et lag med vann. Hvis du har noen dråper med vann på kjøkkenbenken hjemme og så legger noe på, så vil du kjenne at vannet nærmest limer det mot benken.
Carlson forklarer at denne limeeffekten avhenger av flere ting: Fart, størrelse og viskositet.
Motoren i roboten vibrerer. Vibrasjonene får plastmaterialet til å bevege seg som en bølge. Når avstanden mellom plastlaget og metallet er tilstrekkelig liten, det er snakk om mikrometer, gjør bølgebevegelsen at luften mellom overflatene oppfører seg som en væske. Det vil si at gassen får en viskositet. Viskositet sier noe om hvordan væske beveger seg. Sirup og vann har for eksempel ulik viskositet.
Dermed oppstår en limeeffekt, akkurat som vann vil lime ting til kjøkkenbenken hjemme.

– I fysikk har det vært utfordrende å forstå hvordan ting beveger seg når det er snakk om små skalaer, forklarer Carlson. Vi forstår hvordan en fisk svømmer, men en bakterie svømmer på en helt annen måte. Fysikken på liten skala er lite intuitiv for oss.


Det tynne luftlaget mellom roboten og taket er et eksempel på at når størrelser endrer seg, skjer det rare ting. I dette størrelsesområdet finner forskere rare fenomener, som den omtalte kraften.
Hva med større roboter?
Carlson drar fram en stor plastplate. Midt på platen står det en buttkicker.
– Dette er en maskin som brukes av gamere, forklarer Poulain. – Den blir brukt av folk som spiller, for å skape vibrasjoner som imiterer det som skjer i spillet. Vi bruker den til å skape vibrasjoner i platen.
Han og resten av gruppa er i ferd med å teste hvordan teknologien fungerer. Derfor vil de også teste det på større systemer. Foreløpig har privatpersoner på Youtube demonstrert prinsippet. Til nå har Carlson og gjengen gjort dette på en rekke mindre roboter. Så langt har de ikke sparket i gang buttkickeren, men de har sett på ulike varianter av små roboter ved å variere ulike materialer.
– Den enkleste sveveroboten består av et stykke papir og en motor. Vi skal også forsøke med andre bærekraftige materialer, som , som alternativer til plast.. Selve roboten er det ikke så lett å gjøre noe med, sier Carlson.
Så langt virker det som The Force ikke krever så mye av materialene.
Kontaktfri løfting
Carlson forklarer at det er mange mulige bruksområder for robotteknologien.
– Sveveroboter kan bevege seg på alle glatte overflater, oppover vegger og i alle retninger på et tak, sier han.
– I tillegg kan den brukes motsatt, altså at roboten løfter noe uten å være i kontakt med overflaten.
Det er et eget felt innen robotikk som kalles for soft robotics. Det handler om å lage materialer som kan løfte noe uten å ødelegge det.
– Roboter er ikke så flinke til å løfte skjøre ting, som for eksempel et egg, forklarer han. Derfor er det interesse innenfor robotikk for å lage teknologier som kan bidra til å løfte skjøre gjenstander. Med denne teknologien kan vi løfte noe berøringsfritt.
I tillegg til det nevnte eksempelet forklarer Carlson at teknologien kan løfte ting som er glatte eller som ikke bør berøres fordi de kan kontamineres (forurenses). I sistnevnte kategori er alt fra avansert teknologi til biologisk materiale som ikke må kontamineres av berøring.
Se for deg et kirurgisk implantat som lett kan få bakterievekst. Implantatet skal inn i kroppen. I fremtiden kan det kanskje løftes rett inn i pasienten uten at noen har tatt på det.
Flere spørsmål må testes
Selv om robotene fungerer og kraften er forklart, er det flere spørsmål Carlson ønsker å få svar på:
– Vi vet at roboten kan løfte uten å være i kontakt, men det ser også ut som den kan være det. Da må vi vite mer om når det skjer og hvordan. Vi må også vite hva som skjer når limeeffekten slutter å virke. Er det for eksempel bedre med mange små roboter eller én stor? Kan vi bruke kunstig intelligens til å utvikle nytt design og tilbakekoblingssløyfe for motoren, slik at den blir robust?
I tillegg til dette er Carlson nysgjerrig på hvordan roboten virker i vann:
– I prinsippet skulle dette fungere i vann. Det er litt vanskeligere å få til, særlig med tanke på elektronikken, men det burde være mulig. Dette er et forskningsfelt som er helt nytt, men det ville være utrolig spennende å utvikle det.
Artikkelen ble først publisert på Titan.uio.no
«Menneskelig» robot smadret verdensrekorden på halvmaraton